
賽帝交通智能--專注散熱

散熱片,散熱器,散熱模組的專業生產廠家...

我們可以通過電話幫您找到想要的商品
| 傳統運動控制卡 | RtMotion | |
| 靈活性 | 運動控制函數封裝,不公開。 無法定制化開發,只適配固定機型。 |
RtMotion可定制函數, 并且提供高級語言接口編程,二次開發簡便。 |
| 可擴展性 | 擴展軸只能添加運動控制卡,成本增加。 | RtMotion添加軸只需硬件串接,軟件掃描配置參數。不改變原有結構。 |
| 可維護性 | 運動控制卡編程接口單一,C++編程掌握較難,同時硬件拔插易造成接觸不良。 | RtMotion擁有多種高級編程語言接口可供選擇, 同時基于RtMotion的RIMC完成編程與穩定測試 后,無需維護。 |
| PLC功能 | 運動控制卡不具備,需另購PLC。 | RtMotion只需添加配置IO口即可。 |
| 成本 | 常規的卡一次只能帶4~6個軸, 同時計算機的PCI插槽有限。 |
RtMotion可帶96個伺服電機,48個步進電機。 |
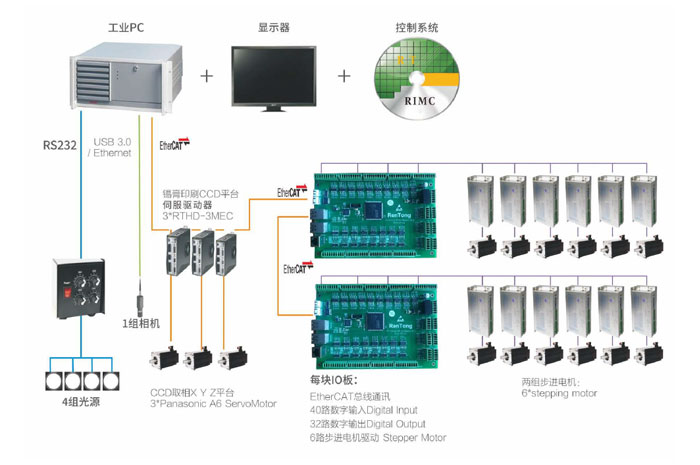
多接口:RtMotion通用庫支持操控96個伺服電機與48個步進電機(如有更高需求,可定制化開發);同時配套的人通IO板卡支持40組數字輸入,32組數字輸出和6個步進電機,且支持擴展。
適用性:RtMotion無需PCI插槽及板卡,運動控制程序和HMI程序可集成在同一臺PC機上,結構簡單,使用方便。
RtMotion運動控制庫提供上位開發接口函數,可支持C#/C++編程。基于CODESYS RTE程序在工控機中運行。通過共享內存空間進行運動控制。具體結構如下圖2.1所示:
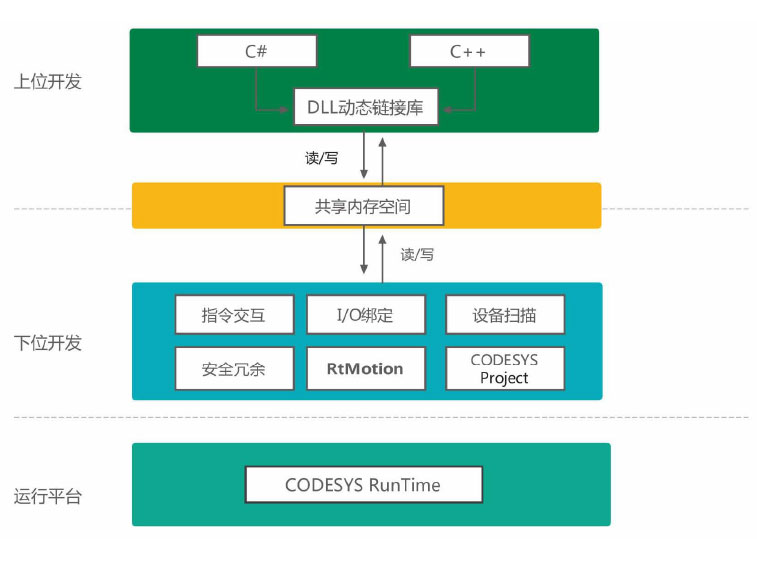
圖2.1 RtMotion運動控制庫結構原理
通過共享內存進行數據交換和指令交互。完成軟運動控制。
使用RtMotion接口完成C#/C++的編程,同時搭建好RtMotion運行環境。
安裝RTE程序,搭建工控機運行環境。將項目下載到工控機。
RtMotion運動控制庫中,內置了路徑規劃算法,上位接口傳入指定類型的運動參數,算法會根據參數完成路徑規劃,從而完成運動控制。
目前已研發:DELTA機器人運動控制庫,SCARA機器人運動控制庫,六軸機器人運動控制庫,軟運動控制庫。并已經在市場上成熟運用。如圖2.2所示:軟運動控制庫函數封裝示例。
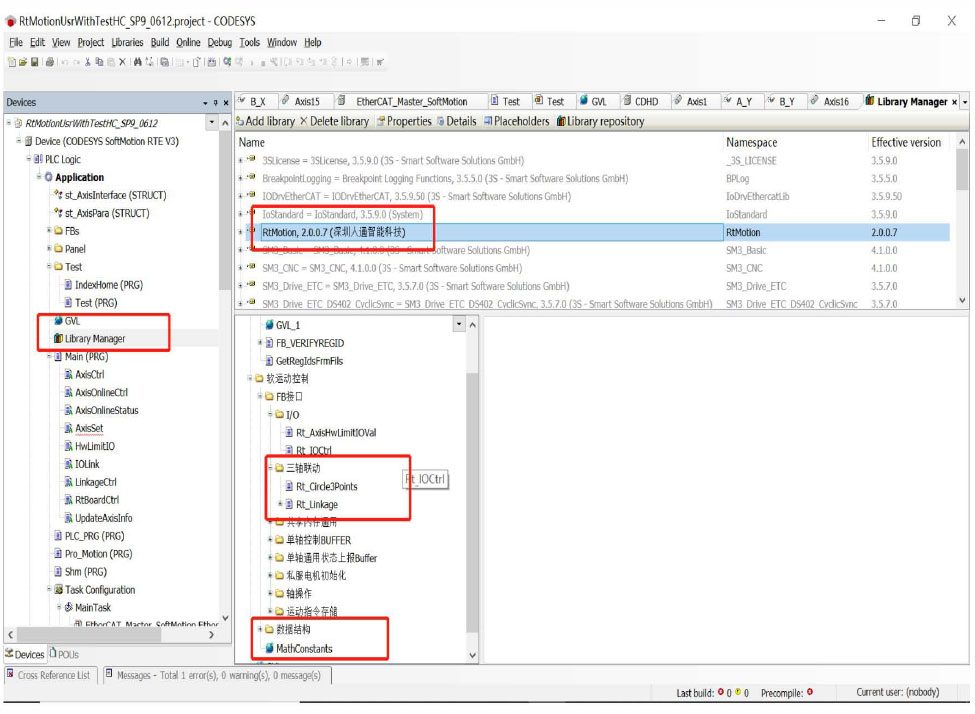
圖2.2軟運動控制庫函數封裝示例
 上位開發接口
上位開發接口
RtMotion提供C++與C#版本的接口函數。可使用計算機高級語言C#,C++等多種高級語言進行上位編程,如下圖2.3所示:C++接口函數的部分指令截圖。
第一章指令列表表1-1指令列表
| 基本指令 | |
| Rt_ConnectPlc | 創建共享內存連接底層PLC |
| Rt_DisConnectP1c | 斷開連接,釋放資源 |
| Rt_GetP1cHeartbeat | 獲取底層PLC心跳值 |
| Rt_SetHeartbeatToP1c | 設置應用層心跳值到底層 |
| 基輸入輸出指令(數字輸入和數字輸出) | |
| Rt_OutIoCtr1 | 控制輸出 |
| Rt_OutIoCtr1AutoRevrse | 控制輸出后自動翻轉 |
| Rt_CompareLinear | 等距離比較輸出 |
| Rt_CompareTimer | 等時間比較輸出 |
| Rt_CompareData | 離散位置比較輸出 |
| Rt_CompareStop | 取消比較輸出 |
| Rt_GetOutIoVa1 | 獲取輸出狀態 |
| Rt_GetInIoVa1 | 獲取輸入狀態 |
| 伺服軸單軸指令 | |
| Rt_SetAxisIdToStatusBuffe r | 給狀態buffer中設置需要查詢的軸 |
| Rt_GetAxisStatus | 獲取軸的位置速度等信息 |
| Rt_GetStartStatus | 獲取軸的啟動狀態 |
| Rt_GetAxisMoveSts | 獲取軸的運動狀態 |
| Rt_GetAxisSts | 獲取軸的狀態(表2-1) |
| Rt_SetAxisMcs | 設置軸的坐標位置 |
| Rt_SetAxisSoftLimit | 設置軸的軟限位 |
| Rt_Canc1eAxisSoftLimit | 取消軸的軟限位 |
| Rt_EnAxisHwLimit | 使能軸的硬限位 |
| Rt_Canc1eAxisHwLimit | 取消軸的硬限位 |
| Rt_Enab1e | 軸使能 |
C++函數部分指令
RtMotion函數接口優點

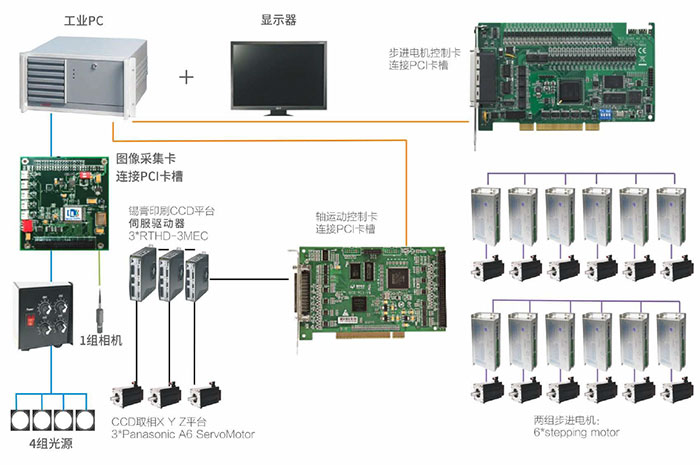
圖3.1 運動控制卡應用現狀
一臺設備需要插入運動控制卡,圖像處理卡等多種類型的PCI卡。接線、編程較復雜。需要不同的工種配合才能完成,在人力、時間成本上花費較多。
運動控制卡修改困難,函數為一卡一編制,更換運動控制卡需要重新編寫或載入編程函數。操作較麻煩。
基于PC架構的控制解決方案,將人機交互軟件、視覺處理軟件、工控下位機軟件、CODESYS平臺的系統集成在RIMC中,以適配不同的外部設備。
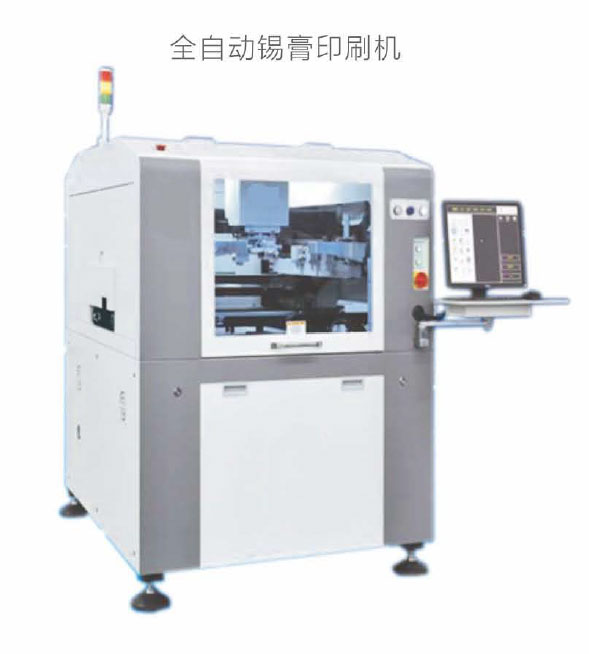
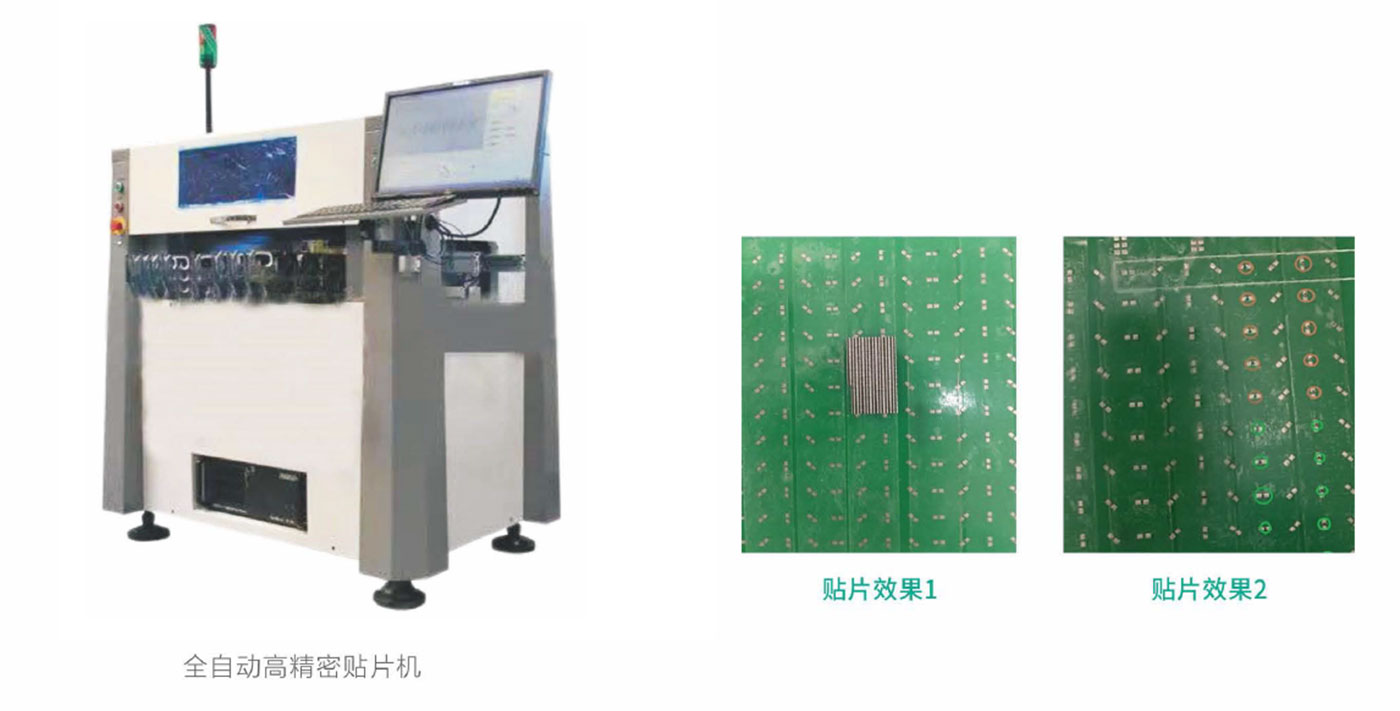
極簡式操作,只需三步即可開始錫膏印刷。
基于上位集成的視覺處理,擁有更快的圖像處理功能。
功能更強大,控制更加靈活,運動過程中隨叫隨停,停止后又繼續跑完,加入飛拍點等,可以定制個性化的功能。
消除了不同種類的運動控制卡之間的協作,由RIMC統一集成。提升工作效率。
采用RtMotion庫進行路徑規劃改良,有效的提高了速度與精度。
速度提升60%-70%。機器帶視覺的情況下勻速貼片速度從4000cph提升到7000cph。最高達到7200cph,穩定在6800cph。增加全閉環功能。
貼片精度控制在0.02mm,行業精度標準0.05mm,T4產品原有精度在0.045mm-0.050mm之間。通過算法及庫函數改進,成功將精度提升。